調査研究
JARTICで実施している調査研究についてご紹介します。
観光地等における道路交通情報の提供手法などについて研究を行っています。
道路交通情報共有地図システム(RI2MAPS)の活用について
JARTICでは、情報収集・提供業務の効率化、都道府県警察や道路管理者(国土交通省、道府県、高速道路会社等)(以下, 総称して「管理者」といいます。)とのコミュニケーションツール、そして最終的には、JARTICユーザに良質な道路交通情報が提供できるようにするためのツールを目指して、RI2MAPS(リマップス)の調査研究を行っています。
RI2MAPSは地理情報システム(GIS:Geographic Information System)をベースとして開発されたWebアプリケーションで、管理者が公開するデータを地図上に重畳描画できるほか、業務上作成したメモを地図上に重ね合わせることもできます。また、スマートフォンやタブレットで外部からも操作可能となっています。
![[RI2MAPS-V システム画面イメージ]](research0210.png)
- 地理院地図、GoogleMap、航空写真の背景切り替え
- 地点クリックによる住所、緯度・経度、地点の読み仮名等の取得・表示
- 「道路交通情報Now!!」をはじめとした各種情報サイトを別ウィンドウで表示可能
- 地図上でメモデータを作成し、メール等を通じて関係者と即時に共有
- PCだけでなく、スマートフォン・タブレットでの外部操作にも対応
- 他システムが保有するデータを連携して表示・管理者が公開するデータの重畳描画
- DXF等の図面データをタイル化し、RI2MAPS-Vの地図上に高精度に重ね合わせ
業務の効率化やコミュニケーションツールとしての調査研究を進める中で、道路・交通分野における業務への応用活用も可能であると考えています。 例えば、管理者が保有する各種データの重畳表示や既存システムとの連携・連動を図るなど、幅広い活用が想定されます。これにより、図面やデータの可視化および高度化が可能となるほか、災害時における情報共有の迅速化、さらには計画立案や施設管理業務の効率化につながることが考えられます。
| 活用分野 | 具体的な事例 |
|---|---|
| 日常業務の効率化 | 行政相談、工事案件資料、協議文書管理における位置情報の記録、伝達、地図表示、社内業務の効率化、管理者とのコミュニケーションツールとしての活用。 |
| 災害時の迅速な伝達 | 通行規制区間の地図表示、災害・事故報告様式の迅速作成。 |
| 既存システム連携 | 道路パトロールシステム、道路情報提供システム、KP(キロポスト)検索・活用。 |
| 個別データの重畳 | 道路台帳付図、計画図、用地図、CCTV、道路施設の管理。 |
| 説明資料作成支援 | 位置図の作成、画像付き現地地図の作成、地図を添付した説明用資料の作成。 |
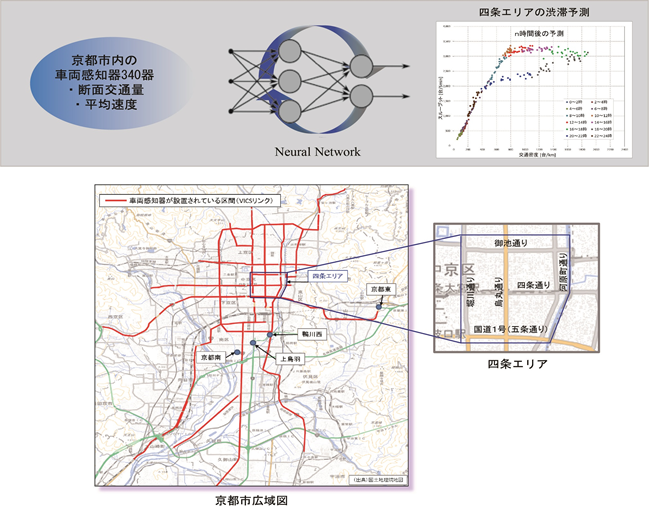
ニューラルネットワークによる巨視的な渋滞状況の予測
本研究では著名な観光地である京都市を対象とし、一般道路に設置された車両感知器により計測及び算定された断面交通量・平均速度の実データと、交通量及び平均速度の関係式から算出される交通密度を活用し、京都市中心部の面的(エリアレベル)な交通渋滞の発生を予測するモデルを検討した。
5分周期で計測及び算定される3か月分(過去データ)の断面交通量・平均速度をニューラルネットワークで学習させ、京都市中心部の対象エリアの1時間後から24時間後の渋滞状況の予測を試みた結果、6時間後までであれば、一定の範囲の精度で予測できることを確認した。
予測モデルを利用した1時間後~24時間後の予測結果
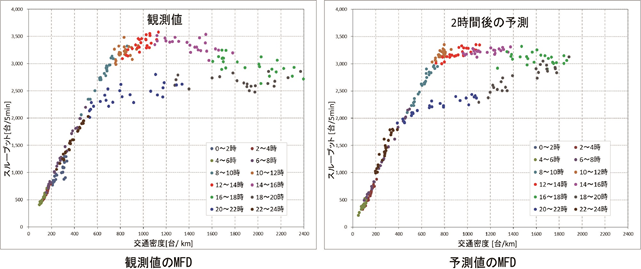
対象期間(2015年10月~12月の3か月間)で特に交通渋滞の多かった11月22日(日)の、1時間後から24時間後の予測を行った。1時間後の予測では、交通密度が高い状態においても、ピーク時の値を高精度で予測することができた。2時間以上先の予測では、24時間後の予測以外は交通密度の予測値が観測値(黒線)より低くなる結果となった。
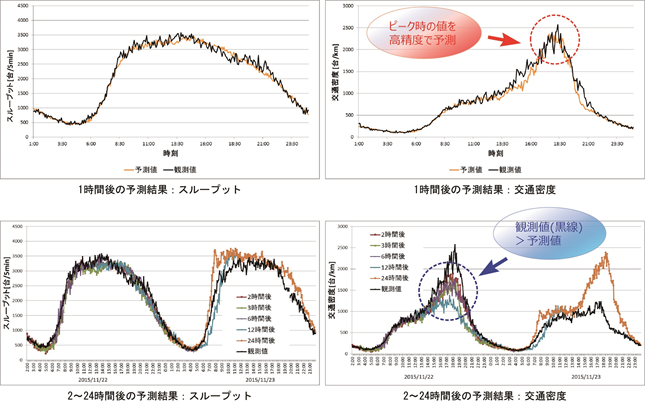
スループット:ここでは、5分間あたりの通過台数
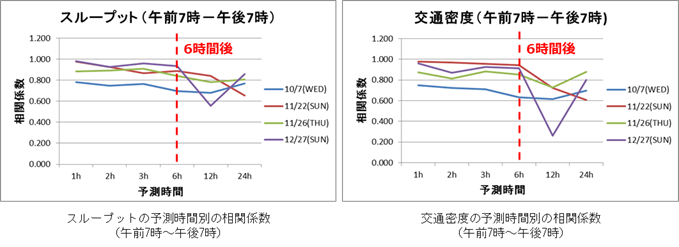
観測値と予測値の相関係数
無作為に抽出した10月7日(水)、11月26日(木)、12月27日(日)と、対象期間中で特に交通渋滞の多かった11月22日(日)の、1時間後から24時間後までの予測について、交通渋滞が多く発生する午前7時から午後7時までの時間帯で観測値と予測値の相関係数を求めた。その結果、6時間後までの予測では、比較的強い相関が表れている。11月22日と12月27日は日曜日であるため、12時間以上を予測しようとすると平日を予測することになり相関係数が低下する傾向が見られる。12時間後の予測の相関係数は、すべてのケースで低下する傾向となっている。渋滞の発生していない時間帯から、渋滞のしやすい時間帯を予測させたことが原因の一つとして考えられる。
予測値を用いたMFD
交通渋滞の多かった11月22日(日)の観測値のMFD※と、車両感知器により計測された2時間前の断面交通量・平均速度を基にスループットと交通密度を予測した結果により、MFDを作成し比較した。
スループットの値はおおむね再現されている。交通密度は16時~20時の間が低く予測される結果となったが、それ以外の時間帯については予測の精度は高い。また、ヒステリシスループも観測値と同じように再現された。
※MFD(Macroscopic Fundamental Diagram)とは、道路ネットワークの面的な交通状態や交通性能を直接把握・評価する巨視的な混雑指標としてDaganzoにより提案された。
本研究では車両感知器から得られるデータを活用し、ニューラルネットワークを用いて四条エリアの渋滞予測を試みた結果、6時間後までであれば、一定の範囲の精度で予測できることを確認した。最大6時間先までの四条エリアの交通状況を予測し、それを基に渋滞の発生確率や程度をドライバーに情報提供することで、渋滞が発生する地域・時間帯を避けるなど、能動的コントロールが可能になる。また、これまでの道路区間単位の情報提供は、経路探索行動に大きな影響を与えてきたが、この技術が確立されれば、ドライバーへの事前情報の提供を行うことができるようになり、より上位の目的地選択、交通手段選択、出発時刻選択等の交通需要に変化を与え、今まで以上の分散が図られることになり、渋滞が回避される可能性がある。
今後は曜日や天気などの他の要素を追加して学習させることや、学習データを増やすことにより、さらなる精度の向上が期待できる。
ニューラルネットワークを用いた巨視的渋滞予測モデルの高度化
本研究では先行研究である上記の「ニューラルネットワークによる巨視的な渋滞状況の予測」で構築したモデルをベースに、データの対象期間を3か月間から5年間に増やし、また予測精度を向上するために考慮すべき要因(カレンダー、気象、イベント等)を取り込み、予測ロジックを高度化することで、実用的な予測精度の範囲を24時間後までに拡張できることを確認した。
決定木(Decision Tree)を用いた予測及び分析
ニューラルネットワークモデルは非常に高い予測精度を有しており、渋滞予測において有力な手法の一つである。一方、入力されたデータがどのように取り扱われ、入力データのうちどの部分が予測精度の向上に寄与しているかといった点については分かりにくいモデルと言える。
そこで、入力される特徴データ個々の重要度を計測することができる決定木(Decision Tree)モデルを用いて予測精度の向上の検討を行った。
本検討においては、エリアの交通状況に影響を与えると考えられる外的要因を用いて、決定木モデルを適用したエリアの渋滞レベル予測モデルについて検討すると共に、予測誤差に対する各外的要因の影響度の計測を行った。
決定木モデルを用いるために、渋滞密度に基づく4段階の指標として、エリア渋滞レベルを設定した。なお、渋滞密度は、MFDによって以下のとおり定義している。
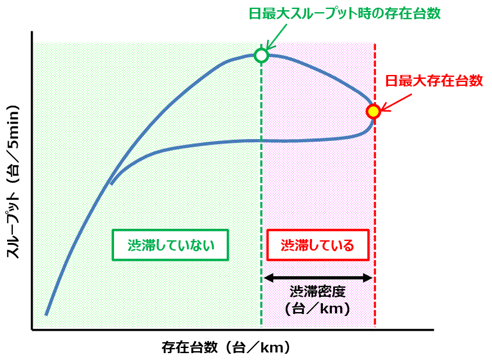
渋滞密度の定義
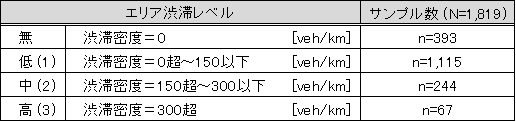
2013年~2017年の四条エリア内トラカンデータから、日最大スループット時の存在台数及び日最大存在台数を抽出し、日別渋滞密度を算定した。月1回程度発生する深刻な渋滞レベルを高レベルとし、高レベル閾値の1/2を閾値として低レベルと中レベルに分割した。エリア渋滞レベル予測のための渋滞密度閾値を以下に示す。
エリア渋滞レベル
エリア渋滞レベル予測に使用した外的要因
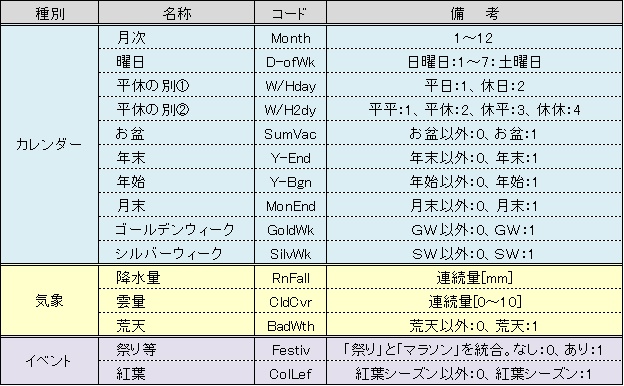
2013年~2017年の5年間より有効データ日数1,819日分を学習用データ75%と検証用データ25%にランダムに分割して学習・検証を行い、検証データに対する分類的中率(Validation Accuracy)を予測精度とした。分類木(Classification Tree)は以下のとおりである。的中率は61.32%と高くはないが、エリアの交通データを使用せずに、一定の精度で渋滞レベルを予測できることが分かった。
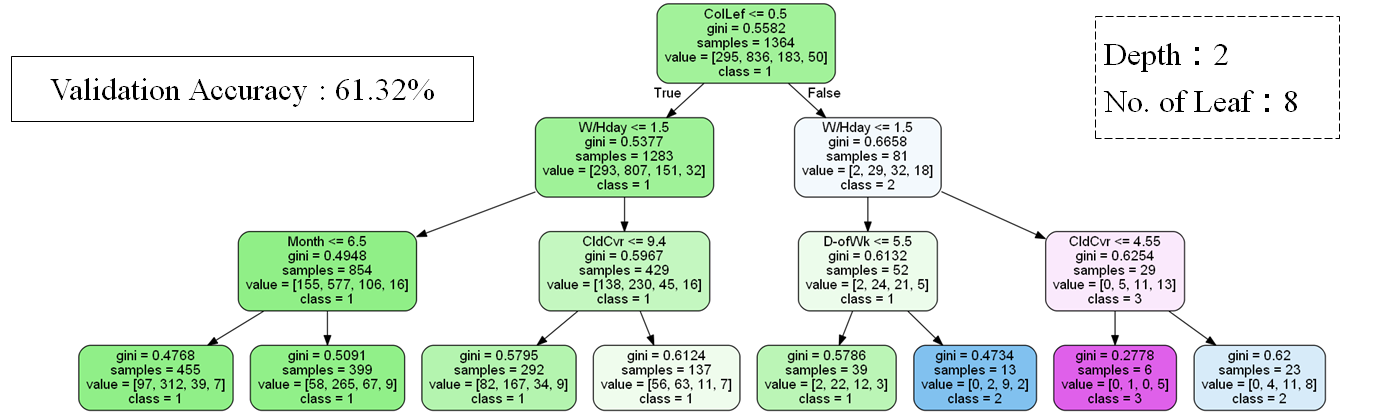
渋滞レベル予測の分類木(Classification Tree)
渋滞レベルの分類における各要因の重要度を図示すると、以下のとおりである。これによると、紅葉及び平休の別①の重要度が高く、以下月次、雲量、曜日、月次の順となっている。
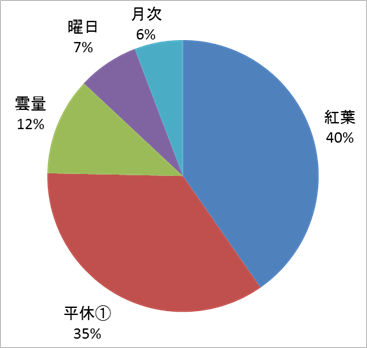
各要因の重要度(渋滞レベル予測 分類木)
ニューラルネットワークモデルの改善検討
決定木(Decision Tree)モデルを用いた外的要因によるデータの分割に基づき、その末端ノード(i.e. 葉)毎にニューラルネットワークモデルを設定する複合モデル(以下「渋滞密度モデル」という)を構築し、前予測モデル(以下「オリジナルモデル」という)と2種のモデル間で予測精度の検証を行った。以下に渋滞密度モデルの概念を示す。
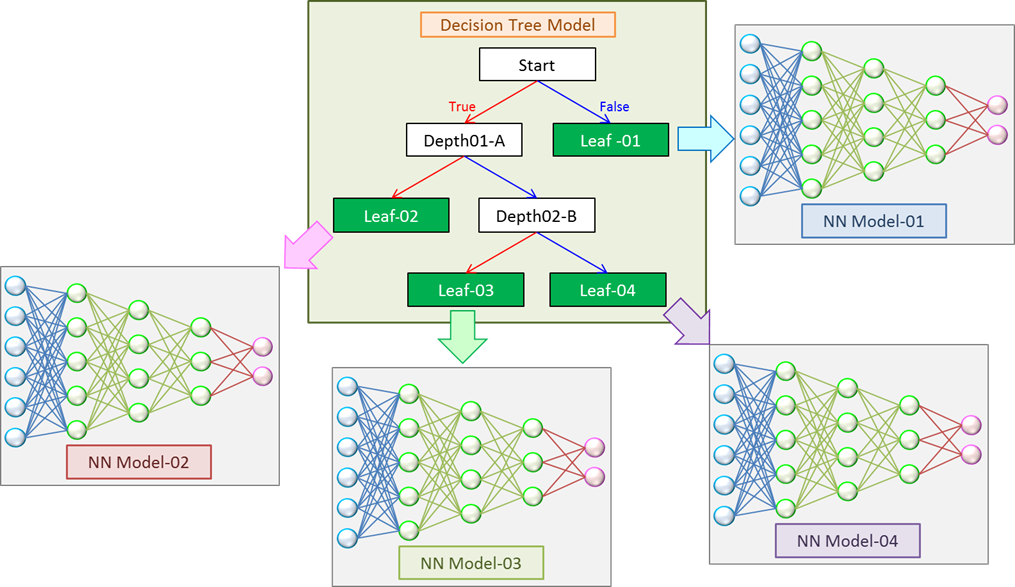
複合モデルの概念
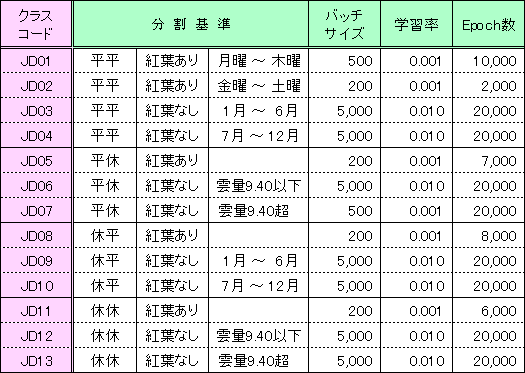
渋滞密度モデルの設定
24時間後の予測結果
24時間後の四条エリアのスループット及び存在台数の予測を行った。2017年11月11日(土)の予測結果を以下に示す。
存在台数の16時~19時間を見ると、観測値(緑線)と比べオリジナルモデル(Orgnl)が低くなっているのに対し、渋滞密度モデル(JmDn)では高い精度で予測ができている。観測値とオリジナルモデル及び渋滞密度モデルのそれぞれの存在台数の相関係数を見てみると、オリジナルモデルが0.961、渋滞密度モデルが0.985となり精度向上が確認できた。
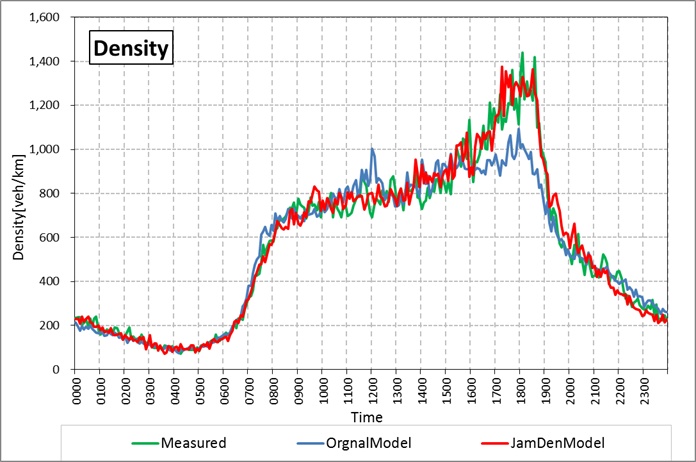
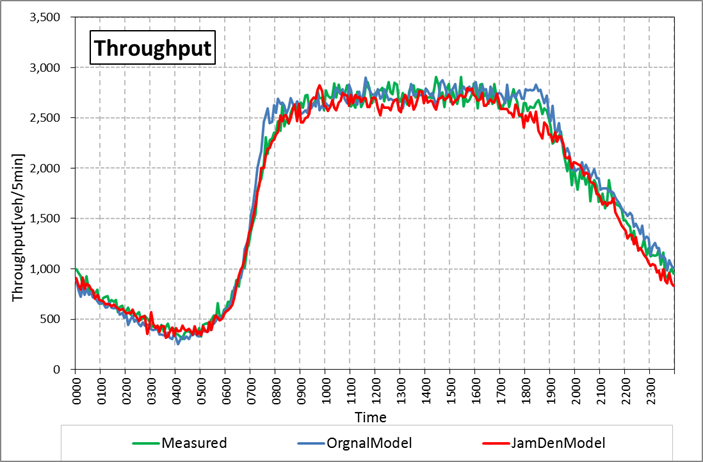
スループット(左)及び存在台数(右)の予測結果
本研究では、学習データをオリジナルモデルの3か月間から4年間に増やしたほか、決定木モデルの利用により、エリアの交通状況に影響を与えると考えられる重要度の高い要因を分析し、ニューラルネットワークモデルに反映させ改善を行った。その結果、24時間後予測の精度向上を図ることができた。
今後は、祭りやマラソンのイベント時など、普段と異なる事象の場合でも渋滞予測が可能となる様、引き続き予測精度の向上を図っていきたい。